
[machine translation]
Hello everyone. I'm Kimura from the Quantum Applications CPJ team at the Quantum Research Institute. I recently presented our latest research findings at FTU 2025, held at Fujitsu Technology Park on December 2, 2025. To share this presentation with a wider audience, I am now providing a detailed introduction on the Fujitsu Tech Blog.
The technology introduced here was jointly announced in a press release with Waseda University and Shibaura Institute of Technology on August 25, 2025 [1], and its details can also be found in a paper published in Nature Portfolio's "Scientific Reports" [2].
Quantum-Classical Hybrid Technology: A Game-Changer for Complex Robot Control
Robot posture control, particularly the "inverse kinematics calculation" (computing the optimal joint angles to reach a target position) for robots with multiple joints, has always been a major challenge due to its high computational complexity. For example, in a full-body multi-joint robot with 17 joints like the human body, conventional classical computational methods struggle with the enormous solution space, leading to approximations in the number of joints for calculations. However, this approach imposed limitations on the smoothness of motion.

To address this long-standing challenge, we have developed a novel hybrid approach leveraging the unique properties of quantum computers. By combining the strengths of quantum and classical computing, this method enables efficient and highly accurate robotic motion control.
Why does quantum technology transform robot control?
Our new method centers on three key points:
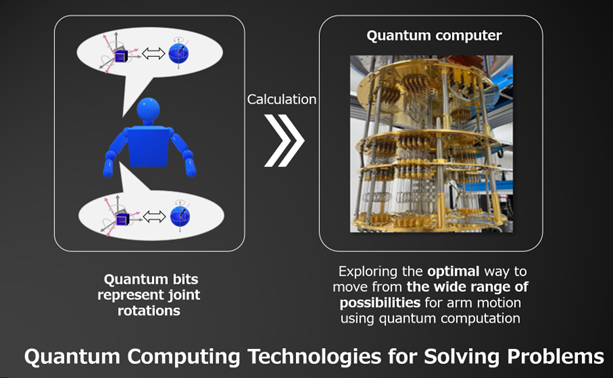
① The innovation of representing robot posture with "quantum bits" We drew inspiration from the idea of representing the orientation and position of each robot component (link) using "quantum bits" (qubits), the fundamental units of quantum computing ( ). Since qubits can represent points in 3D space as "Bloch spheres," we utilize this property to efficiently model the posture of robotic links.
This enables representing the posture of multi-joint robots using a small number of qubits. For example, a manipulator with three joints requires only three qubits, and even a far more complex 16-joint humanoid robot can be modeled with just 16 qubits. This is a major reason we can implement this technology even within the current NISQ environment.
② Reproducing Joint Interdependence with Quantum Entanglement for Faster, More Accurate Computation Robot joints are not independent. The movement of a parent joint inevitably affects its child joints. We reproduced this inter-joint linkage on quantum circuits as "quantum entanglement," a phenomenon unique to qubits. Specifically, we modeled a structure where the parent joint's motion naturally affects the child joint by introducing two-qubit rotation gates such as RXX, RYY, and RZZ. Introducing this quantum entanglement has significantly improved the convergence speed and accuracy of inverse kinematics calculations.
③ Overcoming Challenges with a Quantum-Classical "Hybrid" Approach This method executes "forward kinematics calculations"—determining end-effector positions from joint angles—on a quantum circuit. Conversely, for "inverse kinematics calculations"—back-calculating joint angles from target end-effector positions—it adopts a hybrid approach using classical computers. By combining the parallel processing strength of quantum circuits with the optimization capabilities of classical computers, we provide efficient solutions to highly complex inverse kinematics problems for multi-joint robots.
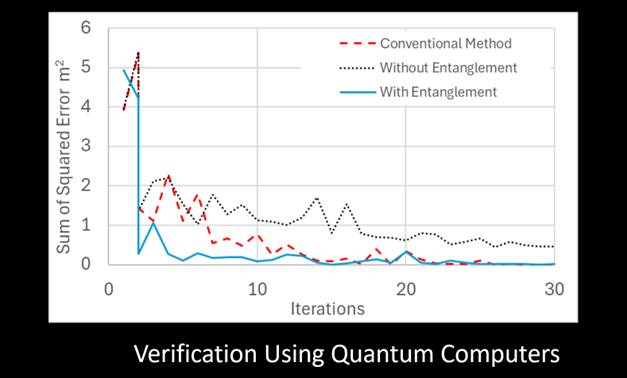
Overwhelming Effectiveness Confirmed in Hardware Verification A key achievement of our research is that we conducted verification using an actual quantum computer, not just theoretical analysis.
Verification: On Fujitsu's quantum simulator, we achieved up to 43% error reduction with fewer computations compared to methods without quantum entanglement. Notably, after 30 iterations, the total position error with entanglement was 36% lower than without. Furthermore, we confirmed the effectiveness of introducing quantum entanglement in a real-machine verification using a 64-qubit superconducting quantum computer jointly developed by RIKEN and Fujitsu.
This has enabled estimates that motion calculations for a full-body multi-joint model with 17 joints—matching the number of joints in the human body—can be executed in approximately 30 minutes. This represents a speed previously unimaginable with conventional classical methods.
The Potential to Transform the Future of Robot Development
This quantum-classical hybrid technology is highly practical as it can be implemented even in the current quantum computer development stage (NISQ) environment.
In the future, it is expected to have a wide range of applications, including real-time control of humanoid robots and multi-joint manipulators, obstacle avoidance in complex environments, and even energy optimization. As quantum computers become more practical, this technology will become a "game changer" in next-generation robot development. Through this innovative technology, we will contribute to the realization of robots that move more intelligently, more smoothly, and more autonomously.
[1] Press Release: https://global.fujitsu/ja-jp/pr/news/2025/08/25-01 [2] Otani, T., et al. (2025). Hybrid Quantum-Classical Computing for Robot Motion Control. Scientific Reports, 15, Article number: 28508.
Technical details Hybrid Quantum-Classical Technology for Practical Quantum Application